可视化工具#
本示例展示了 torchvision 为可视化图像、边界框、分割掩码和关键点提供的一些工具。
import torch
import numpy as np
import matplotlib.pyplot as plt
import torchvision.transforms.functional as F
plt.rcParams["savefig.bbox"] = 'tight'
def show(imgs):
if not isinstance(imgs, list):
imgs = [imgs]
fig, axs = plt.subplots(ncols=len(imgs), squeeze=False)
for i, img in enumerate(imgs):
img = img.detach()
img = F.to_pil_image(img)
axs[0, i].imshow(np.asarray(img))
axs[0, i].set(xticklabels=[], yticklabels=[], xticks=[], yticks=[])
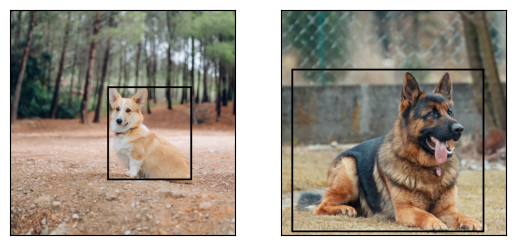
可视化图像网格#
make_grid() 函数可用于创建表示网格中多个图像的张量。此工具需要输入 dtype 为 uint8 的单个图像。
from torchvision.utils import make_grid
from torchvision.io import decode_image
from pathlib import Path
dog1_int = decode_image(str(Path('../../images') / 'dog1.jpg'))
dog2_int = decode_image(str(Path('../../images') / 'dog2.jpg'))
dog_list = [dog1_int, dog2_int]
grid = make_grid(dog_list)
show(grid)

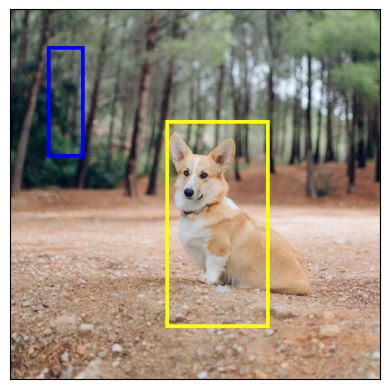
可视化边界框#
我们可以使用 draw_bounding_boxes() 在图像上绘制框。我们可以设置颜色、标签、宽度以及字体和字体大小。框的格式为 (xmin, ymin, xmax, ymax)。
from torchvision.utils import draw_bounding_boxes
boxes = torch.tensor([[50, 50, 100, 200], [210, 150, 350, 430]], dtype=torch.float)
colors = ["blue", "yellow"]
result = draw_bounding_boxes(dog1_int, boxes, colors=colors, width=5)
show(result)
自然地,也可以绘制由 torchvision 检测模型生成的边界框。这里是使用从 fasterrcnn_resnet50_fpn() 加载的 Faster R-CNN 模型的演示。有关此类模型输出的更多详细信息,您可以参考 instance_seg_output。
from torchvision.models.detection import fasterrcnn_resnet50_fpn, FasterRCNN_ResNet50_FPN_Weights
weights = FasterRCNN_ResNet50_FPN_Weights.DEFAULT
transforms = weights.transforms()
images = [transforms(d) for d in dog_list]
model = fasterrcnn_resnet50_fpn(weights=weights, progress=False)
model = model.eval()
outputs = model(images)
print(outputs)
[{'boxes': tensor([[215.9767, 171.1661, 402.0079, 378.7391],
[344.6341, 172.6735, 357.6114, 220.1435],
[153.1306, 185.5568, 172.9223, 254.7014]], grad_fn=<StackBackward0>), 'labels': tensor([18, 1, 1]), 'scores': tensor([0.9989, 0.0701, 0.0611], grad_fn=<IndexBackward0>)}, {'boxes': tensor([[ 23.5964, 132.4331, 449.9360, 493.0223],
[225.8182, 124.6292, 467.2861, 492.2620],
[ 18.5248, 135.4171, 420.9785, 479.2225]], grad_fn=<StackBackward0>), 'labels': tensor([18, 18, 17]), 'scores': tensor([0.9980, 0.0879, 0.0671], grad_fn=<IndexBackward0>)}]
绘制模型检测到的框。将只绘制得分大于给定阈值的框。
score_threshold = .8
dogs_with_boxes = [
draw_bounding_boxes(dog_int, boxes=output['boxes'][output['scores'] > score_threshold], width=4)
for dog_int, output in zip(dog_list, outputs)
]
show(dogs_with_boxes)
可视化分割掩码#
draw_segmentation_masks() 函数可用于在图像上绘制分割掩码。语义分割和实例分割模型的输出不同,因此我们将分别处理它们。
语义分割模型#
我们将看到如何使用 torchvision 的 FCN Resnet-50,通过 fcn_resnet50() 加载。让我们先看看模型的输出。
from torchvision.models.segmentation import fcn_resnet50, FCN_ResNet50_Weights
weights = FCN_ResNet50_Weights.DEFAULT
transforms = weights.transforms(resize_size=None)
model = fcn_resnet50(weights=weights, progress=False)
model = model.eval()
batch = torch.stack([transforms(d) for d in dog_list])
output = model(batch)['out']
print(output.shape, output.min().item(), output.max().item())
torch.Size([2, 21, 500, 500]) -7.089668273925781 14.858259201049805
正如在上面看到的,分割模型的输出是形状为 (batch_size, num_classes, H, W) 的张量。每个值都是未归一化的分数,可以通过使用 softmax 将它们归一化为 [0, 1]。在 softmax 之后,可以将每个值解释为一个概率,指示给定像素属于给定类的可能性。
绘制为狗类和船类检测到的掩码:
sem_class_to_idx = {cls: idx for (idx, cls) in enumerate(weights.meta["categories"])}
normalized_masks = torch.nn.functional.softmax(output, dim=1)
dog_and_boat_masks = [
normalized_masks[img_idx, sem_class_to_idx[cls]]
for img_idx in range(len(dog_list))
for cls in ('dog', 'boat')
]
show(dog_and_boat_masks)
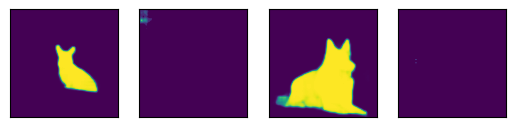
正如预期的那样,模型对狗类很有信心,但对船类不太有信心。
draw_segmentation_masks() 函数可用于在原始图像上绘制这些掩码。此函数期望掩码为布尔掩码,但上面的掩码包含 [0, 1] 中的概率。要获取布尔掩码,我们可以执行以下操作:
class_dim = 1
boolean_dog_masks = (normalized_masks.argmax(class_dim) == sem_class_to_idx['dog'])
print(f"shape = {boolean_dog_masks.shape}, dtype = {boolean_dog_masks.dtype}")
show([m.float() for m in boolean_dog_masks])
shape = torch.Size([2, 500, 500]), dtype = torch.bool
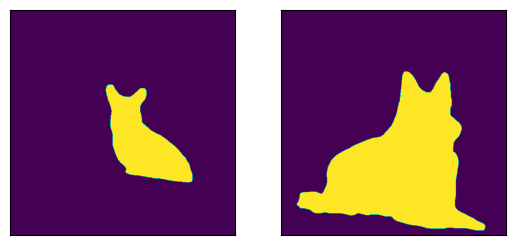
定义 boolean_dog_masks 的行有点晦涩,但你可以将其读作以下查询:“对于哪些像素,'dog' 是最可能的类?”
备注
虽然这里使用了 normalized_masks,但也可以直接使用模型的非归一化分数(因为 softmax 算子保留了顺序)来获得相同的结果。
有了布尔掩码,可以使用 draw_segmentation_masks() 将它们绘制在原始图像上:
from torchvision.utils import draw_segmentation_masks
dogs_with_masks = [
draw_segmentation_masks(img, masks=mask, alpha=0.7)
for img, mask in zip(dog_list, boolean_dog_masks)
]
show(dogs_with_masks)

可以为每张图像绘制多个掩码!记住,模型返回的掩码数量与类别数量相同。像上面一样提出相同的查询,但这次是针对 所有 类别,而不仅仅是狗类:“对于每个像素和每个类别 C,类别 C 是最可能的类别吗?”
这个有点复杂,所以将首先展示如何对单个图像执行此操作,然后推广到批处理:
num_classes = normalized_masks.shape[1]
dog1_masks = normalized_masks[0]
class_dim = 0
dog1_all_classes_masks = dog1_masks.argmax(class_dim) == torch.arange(num_classes)[:, None, None]
print(f"dog1_masks shape = {dog1_masks.shape}, dtype = {dog1_masks.dtype}")
print(f"dog1_all_classes_masks = {dog1_all_classes_masks.shape}, dtype = {dog1_all_classes_masks.dtype}")
dog_with_all_masks = draw_segmentation_masks(dog1_int, masks=dog1_all_classes_masks, alpha=.6)
show(dog_with_all_masks)
dog1_masks shape = torch.Size([21, 500, 500]), dtype = torch.float32
dog1_all_classes_masks = torch.Size([21, 500, 500]), dtype = torch.bool

在上面的图像中,可以看到只绘制了两个掩码:背景的掩码和狗的掩码。这是因为模型认为只有这两个类别在所有像素中是最可能的类别。如果模型在其他像素中检测到另一个类别是最可能的,会在上面看到它的掩码。
去掉背景掩码就像传递 masks=dog1_all_classes_masks[1:] 一样简单,因为背景类别是索引为 0 的类别。
对整个图像批处理执行相同的操作。代码类似,但涉及更多的维度处理。
class_dim = 1
all_classes_masks = normalized_masks.argmax(class_dim) == torch.arange(num_classes)[:, None, None, None]
print(f"shape = {all_classes_masks.shape}, dtype = {all_classes_masks.dtype}")
# The first dimension is the classes now, so we need to swap it
all_classes_masks = all_classes_masks.swapaxes(0, 1)
dogs_with_masks = [
draw_segmentation_masks(img, masks=mask, alpha=.6)
for img, mask in zip(dog_list, all_classes_masks)
]
show(dogs_with_masks)
shape = torch.Size([21, 2, 500, 500]), dtype = torch.bool

实例分割模型#
实例分割模型的输出与语义分割模型有显著不同。将在这里看到如何绘制这些模型的掩码。首先分析 Mask-RCNN 模型的输出。请注意,这些模型不需要对图像进行归一化,因此不需要使用归一化的批处理。
备注
我们在这里描述 Mask-RCNN 模型的输出。object_det_inst_seg_pers_keypoint_det 中的模型都有类似的输出格式,但其中一些可能有额外的信息,如 keypointrcnn_resnet50_fpn() 的关键点,而有些可能没有掩码,如 :func:~torchvision.models.detection.fasterrcnn_resnet50_fpn。
from torchvision.models.detection import maskrcnn_resnet50_fpn, MaskRCNN_ResNet50_FPN_Weights
weights = MaskRCNN_ResNet50_FPN_Weights.DEFAULT
transforms = weights.transforms()
images = [transforms(d) for d in dog_list]
model = maskrcnn_resnet50_fpn(weights=weights, progress=False)
model = model.eval()
output = model(images)
print(output)
Show code cell output
[{'boxes': tensor([[219.7444, 168.1722, 400.7378, 384.0263],
[343.9716, 171.2287, 358.3447, 222.6263],
[301.0303, 192.6917, 313.8879, 232.3154]], grad_fn=<StackBackward0>), 'labels': tensor([18, 1, 1]), 'scores': tensor([0.9987, 0.7187, 0.6525], grad_fn=<IndexBackward0>), 'masks': tensor([[[[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
...,
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.]]],
[[[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
...,
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.]]],
[[[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
...,
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.]]]], grad_fn=<UnsqueezeBackward0>)}, {'boxes': tensor([[ 44.6767, 137.9018, 446.5324, 487.3429],
[ 0.0000, 288.0053, 489.9293, 490.2352]], grad_fn=<StackBackward0>), 'labels': tensor([18, 15]), 'scores': tensor([0.9978, 0.0697], grad_fn=<IndexBackward0>), 'masks': tensor([[[[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
...,
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.]]],
[[[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
...,
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.]]]], grad_fn=<UnsqueezeBackward0>)}]
让我们来分解一下。对于批次中的每张图像,模型会输出一些检测结果(或实例)。每张输入图像的检测数量各不相同。每个实例由其边界框、标签、分数和掩码来描述。
输出的组织方式如下:输出是一个长度为 batch_size 的列表。列表中的每个条目对应于一张输入图像,并且它是一个字典,包含键 'boxes'、'labels'、'scores' 和 'masks'。与这些键相关联的每个值都包含 num_instances 个元素。在上面的例子中,第一张图像检测到了 3 个实例,而第二张图像检测到了 2 个实例。
这些边界框可以用 draw_bounding_boxes() 绘制,就像上面那样,但我们更感兴趣的是掩码。这些掩码与我们在语义分割模型中看到的掩码有很大不同。
dog1_output = output[0]
dog1_masks = dog1_output['masks']
print(f"shape = {dog1_masks.shape}, dtype = {dog1_masks.dtype}, "
f"min = {dog1_masks.min()}, max = {dog1_masks.max()}")
shape = torch.Size([3, 1, 500, 500]), dtype = torch.float32, min = 0.0, max = 0.9999862909317017
这里的掩码对应于概率,表示每个像素属于该实例预测标签的可能性。这些预测标签对应于同一输出字典中的 'labels' 元素。让我们看看为第一张图像的实例预测了哪些标签。
print("For the first dog, the following instances were detected:")
print([weights.meta["categories"][label] for label in dog1_output['labels']])
For the first dog, the following instances were detected:
['dog', 'person', 'person']
有趣的是,模型在图像中检测到了两个人。让我们继续绘制这些掩码。由于 draw_segmentation_masks() 期望布尔掩码,我们需要将这些概率转换为布尔值。记住,这些掩码的语义是“这个像素属于预测类的可能性有多大?”。因此,将这些掩码转换为布尔值的自然方法是使用 0.5 的概率阈值(也可以选择不同的阈值)。
proba_threshold = 0.5
dog1_bool_masks = dog1_output['masks'] > proba_threshold
print(f"shape = {dog1_bool_masks.shape}, dtype = {dog1_bool_masks.dtype}")
# There's an extra dimension (1) to the masks. We need to remove it
dog1_bool_masks = dog1_bool_masks.squeeze(1)
show(draw_segmentation_masks(dog1_int, dog1_bool_masks, alpha=0.9))
shape = torch.Size([3, 1, 500, 500]), dtype = torch.bool

模型似乎正确地检测到了狗,但它也将树木误认为是人。更仔细地查看分数将帮助我们绘制更相关的掩码:
print(dog1_output['scores'])
tensor([0.9987, 0.7187, 0.6525], grad_fn=<IndexBackward0>)
显然,模型对狗的检测比对人的检测更有信心。这是个好消息。在绘制掩码时,我们可以只选择那些得分较高的掩码。这里我们使用 0.75 的分数阈值,并绘制第二只狗的掩码。
score_threshold = .75
boolean_masks = [
out['masks'][out['scores'] > score_threshold] > proba_threshold
for out in output
]
dogs_with_masks = [
draw_segmentation_masks(img, mask.squeeze(1))
for img, mask in zip(dog_list, boolean_masks)
]
show(dogs_with_masks)

第一张图像中的两个人掩码没有被选中,因为它们的得分低于分数阈值。同样,在第二张图像中,类别为 15(对应于 'bench')的实例也没有被选中。
可视化关键点#
draw_keypoints() 函数可以用来在图像上绘制关键点。我们将看到如何使用 torchvision 的 KeypointRCNN,它通过 keypointrcnn_resnet50_fpn() 加载。我们首先来看一下模型的输出。
from torchvision.models.detection import keypointrcnn_resnet50_fpn, KeypointRCNN_ResNet50_FPN_Weights
from torchvision.io import decode_image
person_int = decode_image(str(Path("../../images") / "person1.jpg"))
weights = KeypointRCNN_ResNet50_FPN_Weights.DEFAULT
transforms = weights.transforms()
person_float = transforms(person_int)
model = keypointrcnn_resnet50_fpn(weights=weights, progress=False)
model = model.eval()
outputs = model([person_float])
print(outputs)
Show code cell output
[{'boxes': tensor([[124.3751, 177.9242, 327.6354, 574.7064],
[124.3625, 180.7574, 290.1061, 390.7958]], grad_fn=<StackBackward0>), 'labels': tensor([1, 1]), 'scores': tensor([0.9998, 0.1070], grad_fn=<IndexBackward0>), 'keypoints': tensor([[[208.0176, 214.2408, 1.0000],
[208.0176, 207.0375, 1.0000],
[197.8246, 210.6392, 1.0000],
[208.0176, 211.8398, 1.0000],
[178.6378, 217.8425, 1.0000],
[221.2086, 253.8590, 1.0000],
[160.6502, 269.4662, 1.0000],
[243.9929, 304.2822, 1.0000],
[138.4654, 328.8935, 1.0000],
[277.5698, 340.8990, 1.0000],
[153.4551, 374.5144, 1.0000],
[226.0053, 375.7150, 1.0000],
[226.0053, 370.3125, 1.0000],
[221.8081, 455.5516, 1.0000],
[273.9723, 448.9486, 1.0000],
[193.6275, 546.1932, 1.0000],
[273.3727, 545.5930, 1.0000]],
[[207.8327, 214.6636, 1.0000],
[207.2343, 207.4623, 1.0000],
[198.2590, 209.8627, 1.0000],
[208.4310, 210.4628, 1.0000],
[178.5134, 218.2643, 1.0000],
[219.7997, 251.8704, 1.0000],
[162.3579, 269.2736, 1.0000],
[245.5289, 304.6801, 1.0000],
[138.4238, 330.4848, 1.0000],
[278.4382, 346.0876, 1.0000],
[153.3826, 374.8929, 1.0000],
[233.5618, 368.2917, 1.0000],
[225.7832, 367.6916, 1.0000],
[289.8069, 357.4897, 1.0000],
[245.5289, 389.8956, 1.0000],
[281.4300, 349.0882, 1.0000],
[209.0294, 389.8956, 1.0000]]], grad_fn=<CopySlices>), 'keypoints_scores': tensor([[16.0164, 16.6672, 15.8312, 4.6510, 14.2053, 8.8280, 9.1136, 12.2084,
12.1901, 13.8453, 10.7090, 5.5852, 7.5005, 11.3378, 9.3700, 8.2987,
8.4479],
[12.9326, 13.8158, 14.9053, 3.9368, 12.9585, 6.4240, 6.8328, 10.4227,
9.2907, 10.1066, 10.1019, 0.1822, 4.3057, -4.9904, -2.7409, -2.7874,
-3.9329]], grad_fn=<CopySlices>)}]
正如我们所见,输出包含一个字典列表。输出列表的长度为 batch_size。我们目前只有一张图像,所以列表长度为 1。列表中的每个条目对应于一张输入图像,并且它是一个字典,包含键 boxes、labels、scores、keypoints 和 keypoint_scores。与这些键相关联的每个值都包含 num_instances 个元素。在上面的例子中,图像中检测到了 2 个实例。
kpts = outputs[0]['keypoints']
scores = outputs[0]['scores']
print(kpts)
print(scores)
Show code cell output
tensor([[[208.0176, 214.2408, 1.0000],
[208.0176, 207.0375, 1.0000],
[197.8246, 210.6392, 1.0000],
[208.0176, 211.8398, 1.0000],
[178.6378, 217.8425, 1.0000],
[221.2086, 253.8590, 1.0000],
[160.6502, 269.4662, 1.0000],
[243.9929, 304.2822, 1.0000],
[138.4654, 328.8935, 1.0000],
[277.5698, 340.8990, 1.0000],
[153.4551, 374.5144, 1.0000],
[226.0053, 375.7150, 1.0000],
[226.0053, 370.3125, 1.0000],
[221.8081, 455.5516, 1.0000],
[273.9723, 448.9486, 1.0000],
[193.6275, 546.1932, 1.0000],
[273.3727, 545.5930, 1.0000]],
[[207.8327, 214.6636, 1.0000],
[207.2343, 207.4623, 1.0000],
[198.2590, 209.8627, 1.0000],
[208.4310, 210.4628, 1.0000],
[178.5134, 218.2643, 1.0000],
[219.7997, 251.8704, 1.0000],
[162.3579, 269.2736, 1.0000],
[245.5289, 304.6801, 1.0000],
[138.4238, 330.4848, 1.0000],
[278.4382, 346.0876, 1.0000],
[153.3826, 374.8929, 1.0000],
[233.5618, 368.2917, 1.0000],
[225.7832, 367.6916, 1.0000],
[289.8069, 357.4897, 1.0000],
[245.5289, 389.8956, 1.0000],
[281.4300, 349.0882, 1.0000],
[209.0294, 389.8956, 1.0000]]], grad_fn=<CopySlices>)
tensor([0.9998, 0.1070], grad_fn=<IndexBackward0>)
KeypointRCNN 模型检测到图像中有两个实例。如果你使用 :func:~draw_bounding_boxes 绘制边界框,你会认出它们是人和冲浪板。如果我们查看分数,我们会意识到模型对人的信心远高于冲浪板。现在我们可以设置一个置信度阈值,并绘制我们有足够信心的实例。让我们设置一个 0.75 的阈值,并过滤出对应于人的关键点。
detect_threshold = 0.75
idx = torch.where(scores > detect_threshold)
keypoints = kpts[idx]
print(keypoints)
tensor([[[208.0176, 214.2408, 1.0000],
[208.0176, 207.0375, 1.0000],
[197.8246, 210.6392, 1.0000],
[208.0176, 211.8398, 1.0000],
[178.6378, 217.8425, 1.0000],
[221.2086, 253.8590, 1.0000],
[160.6502, 269.4662, 1.0000],
[243.9929, 304.2822, 1.0000],
[138.4654, 328.8935, 1.0000],
[277.5698, 340.8990, 1.0000],
[153.4551, 374.5144, 1.0000],
[226.0053, 375.7150, 1.0000],
[226.0053, 370.3125, 1.0000],
[221.8081, 455.5516, 1.0000],
[273.9723, 448.9486, 1.0000],
[193.6275, 546.1932, 1.0000],
[273.3727, 545.5930, 1.0000]]], grad_fn=<IndexBackward0>)
太好了,现在我们有了对应于人的关键点。每个关键点由 x、y 坐标和可见性表示。现在我们可以使用 draw_keypoints() 函数来绘制关键点。请注意,该工具期望的是 uint8 图像。
from torchvision.utils import draw_keypoints
res = draw_keypoints(person_int, keypoints, colors="blue", radius=3)
show(res)
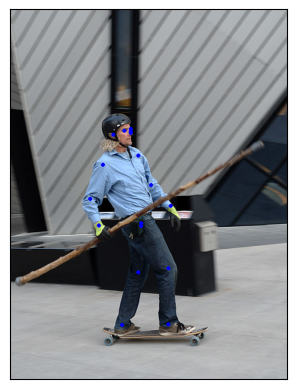
正如我们所见,关键点在图像上显示为彩色圆圈。coco 人体关键点的顺序和表示如下列表。
coco_keypoints = [
"nose", "left_eye", "right_eye", "left_ear", "right_ear",
"left_shoulder", "right_shoulder", "left_elbow", "right_elbow",
"left_wrist", "right_wrist", "left_hip", "right_hip",
"left_knee", "right_knee", "left_ankle", "right_ankle",
]
如果我们对连接关键点感兴趣呢?这在创建姿态检测或动作识别时特别有用。我们可以使用 connectivity 参数轻松地连接关键点。仔细观察会发现,我们需要按以下顺序连接点来构建人体骨骼。
nose -> left_eye -> left_ear. (0, 1), (1, 3)
nose -> right_eye -> right_ear. (0, 2), (2, 4)
nose -> left_shoulder -> left_elbow -> left_wrist. (0, 5), (5, 7), (7, 9)
nose -> right_shoulder -> right_elbow -> right_wrist. (0, 6), (6, 8), (8, 10)
left_shoulder -> left_hip -> left_knee -> left_ankle. (5, 11), (11, 13), (13, 15)
right_shoulder -> right_hip -> right_knee -> right_ankle. (6, 12), (12, 14), (14, 16)
我们将创建一个包含这些要连接的关键点 ID 的列表。
connect_skeleton = [
(0, 1), (0, 2), (1, 3), (2, 4), (0, 5), (0, 6), (5, 7), (6, 8),
(7, 9), (8, 10), (5, 11), (6, 12), (11, 13), (12, 14), (13, 15), (14, 16)
]
将上述列表传递给 connectivity 参数以连接关键点。
res = draw_keypoints(person_int, keypoints, connectivity=connect_skeleton, colors="blue", radius=4, width=3)
show(res)
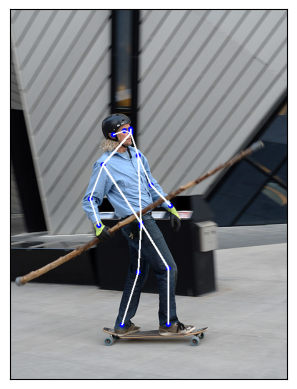
看起来很不错。
绘制带可见性的关键点#
看一下另一个关键点预测模块产生的结果,并显示连接性:
prediction = torch.tensor(
[[[208.0176, 214.2409, 1.0000],
[000.0000, 000.0000, 0.0000],
[197.8246, 210.6392, 1.0000],
[000.0000, 000.0000, 0.0000],
[178.6378, 217.8425, 1.0000],
[221.2086, 253.8591, 1.0000],
[160.6502, 269.4662, 1.0000],
[243.9929, 304.2822, 1.0000],
[138.4654, 328.8935, 1.0000],
[277.5698, 340.8990, 1.0000],
[153.4551, 374.5145, 1.0000],
[000.0000, 000.0000, 0.0000],
[226.0053, 370.3125, 1.0000],
[221.8081, 455.5516, 1.0000],
[273.9723, 448.9486, 1.0000],
[193.6275, 546.1933, 1.0000],
[273.3727, 545.5930, 1.0000]]]
)
res = draw_keypoints(person_int, prediction, connectivity=connect_skeleton, colors="blue", radius=4, width=3)
show(res)
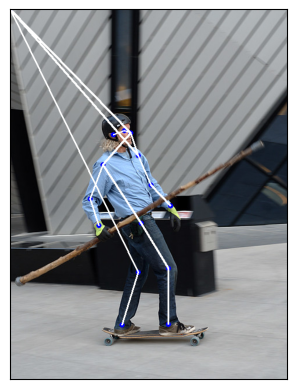
发生了什么?预测新关键点的模型无法检测到滑板手左上身体隐藏的三个点。更准确地说,模型预测 (x, y, vis) = (0, 0, 0) 用于左眼、左耳和左髋。所以我们绝对不想显示这些关键点和连接,你也不必这样做。查看 draw_keypoints() 的参数,我们可以看到可以传递一个可见性张量作为附加参数。根据模型的预测,我们有可见性作为第三关键点维度,我们只需要提取它。让我们将 prediction 拆分为关键点坐标及其各自的可见性,并将它们作为参数传递给 draw_keypoints()。
coordinates, visibility = prediction.split([2, 1], dim=-1)
visibility = visibility.bool()
res = draw_keypoints(
person_int, coordinates, visibility=visibility, connectivity=connect_skeleton, colors="blue", radius=4, width=3
)
show(res)

我们可以看到未检测到的关键点没有绘制,并且跳过了不可见的关键点连接。这可以减少在多重检测图像上的噪声,或者像我们这种情况,当关键点预测模型漏掉了一些检测时。大多数 torch 关键点预测模型都会为每个预测返回可见性,随时供你使用。我们在第一种情况下使用的 keypointrcnn_resnet50_fpn() 模型也是如此。