基础
导航
基础#
参考:Practical Quantization in PyTorch
NN 量化目标:运行更快、内存需求更低。
量化源于信息压缩;在深度神经网络中,它指的是降低其权重和/或激活的数值精度。
过度参数化的 DNN 有更多的 自由度,这使它们成为信息压缩的良好候选对象 [Gholami, Kim, Dong, Yao, Mahoney, and Keutzer, 2021]。
当量化模型时,通常会发生两件事——模型变得更小,运行效率更高。硬件供应商明确地允许更快地处理 8 位数据(而不是 32 位数据),从而获得更高的 吞吐量 (throughput)。更小的模型具有更低的内存占用和功耗 [Krishnamoorthi, 2018],这对于边缘部署至关重要。
映射函数#
映射函数:将值从浮点数映射到整数空间的函数。常用的映射函数是由 \(Q(r) = round(r/S + Z)\) 给出的线性变换,其中为 \(r\) 为输入,\(S, Z\) 为量化参数(quantization parameters)。为了重新转换为浮点空间,反函数由 \(\overline{r} = (Q(r) - Z) \cdot S\) 给出(被称为 反量化,即 dequantization)。
备注
\(\overline{r} \neq r\),它们之间的差异构成了量化误差。
量化参数#
映射函数由缩放因子 \(S\) 和零点 \(Z\) 所参数化。\(S\) 仅仅是输入范围与输出范围的比值 \(S = \frac {\beta - \alpha}{\beta_q - \alpha_q}\)。这里 \([\alpha, \beta]\) 是输入的裁剪(clipping)范围,即允许输入的边界。\([\alpha_q, \beta_q]\) 是它被映射到的量化输出空间的范围。对于 8 位量化,输出范围 \(\beta_q - \alpha_q \leq 2^8 -1\)。\(Z = -(\frac {\alpha}{S} - \alpha_q)\) 作为偏置,以确保输入空间中的 \(0\) 完全映射到量化空间中的 \(0\)。
校准#
选择输入裁剪范围的过程称为 校准 (calibration)。最简单的方法(也是 PyTorch 中的默认方法)是记录正在运行的最小值和最大值,并将它们赋值给 \(\alpha\) 和 \(\beta\)。TensorRT 也使用熵最小化(KL 散度),均方误差最小化,或输入范围的百分位数。
在 PyTorch 中,Observer 模块收集关于输入值的统计信息并计算 qparams \(S,Z\)。不同的校准方案会产生不同的量化输出,最好通过经验验证哪种方案最适合您的应用程序和体系结构。
import torch
from torch.ao.quantization.observer import MinMaxObserver, MovingAverageMinMaxObserver, HistogramObserver
# 设置输入
C, L = 3, 2
normal = torch.distributions.normal.Normal(0, 1)
inputs = [normal.sample((C, L)),
normal.sample((C, L))]
inputs
[tensor([[-0.4145, 0.4905],
[ 1.9405, -1.1051],
[ 2.1657, -1.1413]]),
tensor([[-1.2207, 0.1083],
[-0.7169, 2.2443],
[-0.3198, -0.2961]])]
设置观测:
observers = [MinMaxObserver(),
MovingAverageMinMaxObserver(),
HistogramObserver()]
计算并查看量化参数:
for obs in observers:
for x in inputs:
obs(x)
print(obs.__class__.__name__, obs.calculate_qparams())
MinMaxObserver (tensor([0.0136]), tensor([90], dtype=torch.int32))
MovingAverageMinMaxObserver (tensor([0.0130]), tensor([88], dtype=torch.int32))
HistogramObserver (tensor([0.0124]), tensor([72], dtype=torch.int32))
仿射和对称量化方案#
仿射(affine)或非对称量化(asymmetric quantization)方案分配输入范围的最小和最大观测值。仿射方案通常提供更小的剪切范围,并且对于量化非负激活非常有用(如果你的输入张量永远都不是负的,你就不需要输入范围包含负值)。计算范围为 \(\alpha=\min(r), \beta = \max(r)\)。当用于权值张量 [Wu, Judd, Zhang, Isaev, and Micikevicius, 2020] 时,仿射量化会导致更昂贵的计算推理。
对称量化(Symmetric quantization)方案将输入范围集中在 \(0\) 附近,消除了计算零点偏置的需要。计算范围为 \(-\alpha=\beta=\max(|\max(r)|,|\min(r)|)\)。
对于倾斜的信号(如非负激活),这可能会导致糟糕的量化分辨率(quantization resolution),因为剪辑范围包括从未在输入中出现的值(参见下面的 pyplot)。
from matplotlib import pyplot as plt
import numpy as np
def get_symmetric_range(x):
'''获取对称范围'''
beta = torch.max(x.max(), x.min().abs())
return -beta.item(), beta.item()
def get_affine_range(x):
'''获取仿射范围'''
return x.min().item(), x.max().item()
def plot(plt, data, scheme):
'''画出不同方案的分布'''
boundaries = get_affine_range(data) if scheme == 'affine' \
else get_symmetric_range(data)
a, _, _ = plt.hist(data, density=True, bins=100)
ymin, ymax = np.quantile(a[a > 0], [0.25, 0.95])
plt.vlines(x=boundaries, ls='--', colors='purple', ymin=ymin, ymax=ymax)
# 模拟激活和权重
act = torch.distributions.pareto.Pareto(1, 10).sample((1, 1024))
weights = torch.distributions.normal.Normal(
0, 0.12).sample((3, 64, 7, 7)).flatten()
fig, axs = plt.subplots(2, 2)
plot(axs[0, 0], act, 'affine')
axs[0, 0].set_title("Activation, Affine-Quantized")
plot(axs[0, 1], act, 'symmetric')
axs[0, 1].set_title("Activation, Symmetric-Quantized")
plot(axs[1, 0], weights, 'affine')
axs[1, 0].set_title("Weights, Affine-Quantized")
plot(axs[1, 1], weights, 'symmetric')
axs[1, 1].set_title("Weights, Symmetric-Quantized")
plt.show()
在 PyTorch 中,你可以在初始化 Observer 时指定仿射或对称模式。注意,并非所有 observer 都支持这两种方案。
for qscheme in [torch.per_tensor_affine, torch.per_tensor_symmetric]:
obs = MovingAverageMinMaxObserver(qscheme=qscheme)
for x in inputs:
obs(x)
print(f"Qscheme: {qscheme} | {obs.calculate_qparams()}")
Qscheme: torch.per_tensor_affine | (tensor([0.0130]), tensor([88], dtype=torch.int32))
Qscheme: torch.per_tensor_symmetric | (tensor([0.0170]), tensor([128]))
逐张量和逐通道量化方案#
量化参数可以作为整体计算层的整个权值张量,也可以单独计算每个通道的权值张量。在每张量中,对层中的所有通道应用相同的剪切范围:
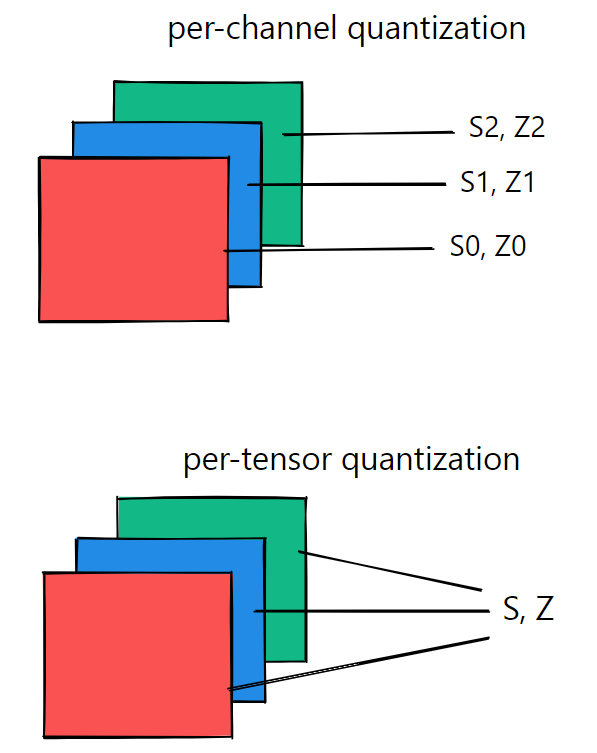
对于权值量化,逐通道(Per-Channel)对称量化提供了更好的精度;逐张量(Per-Tensor)量化的性能很差,这可能是由于不同通道之间的转换权值与批量范数折叠(batchnorm folding) [Wu, Judd, Zhang, Isaev, and Micikevicius, 2020] 差异很大。
from torch.ao.quantization.observer import MovingAveragePerChannelMinMaxObserver
# 计算全部 `C` 通道的 qparams
obs = MovingAveragePerChannelMinMaxObserver(ch_axis=0)
for x in inputs:
obs(x)
print(obs.calculate_qparams())
(tensor([0.0036, 0.0119, 0.0128]), tensor([119, 92, 88], dtype=torch.int32))
obs = MovingAveragePerChannelMinMaxObserver(ch_axis=1)
for x in inputs:
obs(x)
print(obs.calculate_qparams())
(tensor([0.0101, 0.0064]), tensor([ 42, 176], dtype=torch.int32))
后端引擎#
目前,量化算子通过 FBGEMM 后端 在 x86 机器上运行,或者在 ARM 机器上使用 QNNPACK 原语。服务器 GPU 的后端支持(通过 TensorRT 和 cuDNN)即将推出。了解更多关于将量化扩展到自定义后端:RFC-0019。
from torch.ao.quantization.qconfig import get_default_qconfig
backend = 'fbgemm' # if x86 else 'qnnpack'
qconfig = get_default_qconfig(backend)
torch.backends.quantized.engine = backend
QConfig#
QConfig NamedTuple 存储用于量化激活和权重的 Observer 和量化方案。
一定要传递 Observer 类(而不是实例),或者可以返回 Observer 实例的可调用对象。使用 with_args() 覆盖默认参数。
from torch.ao.quantization.qconfig import QConfig
my_qconfig = QConfig(
activation=MovingAverageMinMaxObserver.with_args(
qscheme=torch.per_tensor_affine),
weight=MovingAveragePerChannelMinMaxObserver.with_args(qscheme=torch.qint8)
)
my_qconfig
QConfig(activation=functools.partial(<class 'torch.ao.quantization.observer.MovingAverageMinMaxObserver'>, qscheme=torch.per_tensor_affine){}, weight=functools.partial(<class 'torch.ao.quantization.observer.MovingAveragePerChannelMinMaxObserver'>, qscheme=torch.qint8){})
在 PyTorch 中#
PyTorch 允许您使用几种不同的方式来量化您的模型:
Eager 模式 v/s FX Graph 模式:如果你更喜欢灵活但手动的,或受限的自动过程
静态 v/s 动态:如果量化激活(层的输出)的
qparams为所有输入预先计算,或对每个输入重新计算,量化感知训练(quantization-aware training) v/s 训练后量化(post-training quantization):如果
qparams是在有或没有重新训练的情况下计算的
FX Graph Mode 自动融合符合条件的模块,插入 Quant/DeQuant stub,校准模型并返回量化模块——所有这些都是在两个方法调用中进行的——但仅适用于 可符号跟踪 的网络。
在 DNN 中,量化的合适候选对象是 FP32 权值(层参数)和激活(层输出)。量化权值可以减少模型的大小。量化激活通常会导致更快的推理。
例如,50 层 ResNet 网络有近 2600 万个权值参数,在正向传程中计算近 1600 万个激活。
Post-Training Dynamic/Weight-only Quantization#
这里模型的权值是预量化的;在推理期间,激活是动态量化的。这是所有方法中最简单的一种,它在 quantize_dynamic() 中有一行 API 调用。目前只支持线性和循环(LSTM、GRU、RNN)层进行动态量化。
可以导致更高的精度,因为每个输入的裁剪范围是精确校准的
对于像 LSTM 和 Transformer 这样的模型,动态量化是首选的,因为从内存中写入/检索模型的权值会受制于带宽
在运行时对每个层的激活进行校准和量化会增加计算开销。
import torch
from torch import nn
# 小 model
def create_model():
m = nn.Sequential(
nn.Conv2d(2, 64, (8,)),
nn.ReLU(),
nn.Linear(16, 10),
nn.LSTM(10, 10))
return m
eager 模式
from torch.ao.quantization.quantize import quantize_dynamic
m = create_model()
m.eval()
model_quantized = quantize_dynamic(
model=m, qconfig_spec={nn.LSTM, nn.Linear}, dtype=torch.qint8, inplace=False
)
model_quantized
Sequential(
(0): Conv2d(2, 64, kernel_size=(8,), stride=(1, 1))
(1): ReLU()
(2): DynamicQuantizedLinear(in_features=16, out_features=10, dtype=torch.qint8, qscheme=torch.per_tensor_affine)
(3): DynamicQuantizedLSTM(10, 10)
)
FX 模式
from torch.ao.quantization import quantize_fx
from torch.ao.quantization.qconfig import default_dynamic_qconfig
m = create_model()
m.eval()
# 空键表示应用于所有模块的默认值
qconfig_dict = {"": default_dynamic_qconfig}
model_prepared = quantize_fx.prepare_fx(m, qconfig_dict)
model_quantized = quantize_fx.convert_fx(model_prepared)
/home/pc/xinet/anaconda3/envs/torchx/lib/python3.10/site-packages/torch/ao/quantization/fx/quantization_patterns.py:630: UserWarning: dtype combination: (torch.float32, torch.qint8, torch.quint8) is not supported by Conv supported dtype combinations are: [(torch.quint8, torch.qint8, None)]
warnings.warn(
Post-Training Static Quantization (PTQ)#
PTQ 也预量化模型权重,但不是动态校准激活,而是使用验证数据对剪切范围进行预校准和固定(“静态”)。在推理过程中,激活在运算之间保持量化精度。大约 100 个小批次的代表性数据就足以校准观测者。为了方便起见,下面的例子在校准中使用了随机数据——在应用程序中使用随机数据将导致错误的 qparams。

模块融合 将多个顺序模块(如:[Conv2d, BatchNorm, ReLU])组合成一个。融合模块意味着编译器只需要运行一个内核而不是多个;这可以通过减少量化误差来提高速度和准确性。
静态量化比动态量化具有更快的推理速度,因为它消除了层之间的 float<->int 转换成本。
静态量化模型可能需要定期重新校准,以保持对分布漂移的鲁棒性。
静态量化模型包括以下步骤:
融合模块
插入 Quant/DeQuant 存根
准备融合模块(在层前和层后插入观察者)
校准准备好的模块(传递代表数据)
转换校准模块(替换为量化版本)
from torch.quantization import quantize_fx
import torch
from torch import nn
# 如果在ARM上运行,使用 `qnnpack`。
backend = "fbgemm" # 运行在 x86 CPU 上。
def create_model():
m = nn.Sequential(
nn.Conv2d(2, 64, 3),
nn.ReLU(),
nn.Conv2d(64, 128, 3),
nn.ReLU()
)
return m
急切的模式#
融合:就地融合用所述融合模块替换所述序列中的第一个模块,其余用相同模块替换。
m = create_model()
# fuse first Conv-ReLU pair
torch.quantization.fuse_modules(m, ['0', '1'], inplace=True)
# fuse second Conv-ReLU pair
torch.quantization.fuse_modules(m, ['2', '3'], inplace=True)
Sequential(
(0): ConvReLU2d(
(0): Conv2d(2, 64, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU()
)
(1): Identity()
(2): ConvReLU2d(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU()
)
(3): Identity()
)
插入 stub:
m = nn.Sequential(torch.quantization.QuantStub(),
*m,
torch.quantization.DeQuantStub())
m
Sequential(
(0): QuantStub()
(1): ConvReLU2d(
(0): Conv2d(2, 64, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU()
)
(2): Identity()
(3): ConvReLU2d(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU()
)
(4): Identity()
(5): DeQuantStub()
)
准备:
from torch.ao.quantization.qconfig import get_default_qconfig
from torch.ao.quantization.quantize import prepare
m.qconfig = get_default_qconfig(backend)
prepare(m, inplace=True)
/home/pc/xinet/anaconda3/envs/torchx/lib/python3.10/site-packages/torch/ao/quantization/observer.py:177: UserWarning: Please use quant_min and quant_max to specify the range for observers. reduce_range will be deprecated in a future release of PyTorch.
warnings.warn(
Sequential(
(0): QuantStub(
(activation_post_process): HistogramObserver()
)
(1): ConvReLU2d(
(0): Conv2d(2, 64, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU()
(activation_post_process): HistogramObserver()
)
(2): Identity()
(3): ConvReLU2d(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU()
(activation_post_process): HistogramObserver()
)
(4): Identity()
(5): DeQuantStub()
)
校准:为了方便起见,这个例子使用了随机数据。使用代表性(验证)数据代替。
# with torch.inference_mode(): # PyTorch 1.9
with torch.no_grad():
for _ in range(10):
x = torch.rand(1, 2, 28, 28)
m(x)
转换:
torch.quantization.convert(m, inplace=True)
Sequential(
(0): Quantize(scale=tensor([0.0079]), zero_point=tensor([0]), dtype=torch.quint8)
(1): QuantizedConvReLU2d(2, 64, kernel_size=(3, 3), stride=(1, 1), scale=0.0100000761449337, zero_point=0)
(2): Identity()
(3): QuantizedConvReLU2d(64, 128, kernel_size=(3, 3), stride=(1, 1), scale=0.004895982798188925, zero_point=0)
(4): Identity()
(5): DeQuantize()
)
检查:
# 1 字节,而不是 FP32 的 4 字节
print(m[1].weight().element_size())
1
FX GRAPH 模式#
from torch.ao.quantization.qconfig import get_default_qconfig
from torch.ao.quantization import quantize_fx
def calibrate(model, data_loader):
'''使用代表性(验证)数据来校准'''
model.eval()
# with torch.inference_mode():
with torch.no_grad():
for image, _ in data_loader:
model(image)
def ptq(float_model, sample_inference_data, backend='fbgemm'):
qconfig = get_default_qconfig(backend)
qconfig_dict = {"": qconfig}
float_model.eval()
prepared_model = quantize_fx.prepare_fx(float_model, qconfig_dict)
# 运行校准
calibrate(prepared_model, sample_inference_data)
return prepared_model
from torch.ao.quantization.qconfig import get_default_qconfig
from torch.ao.quantization import quantize_fx
def data_iter():
for _ in range(10):
yield torch.rand(1, 2, 28, 28), _
m = create_model()
model_prepared = ptq(m, data_iter(), backend='fbgemm')
# 量化
model_quantized = quantize_fx.convert_fx(model_prepared)
Quantization-aware Training (QAT)#

PTQ 方法对于大型模型非常好,但在较小的模型中准确性会受到影响。当然,这是由于将 FP32 的模型调整到 INT8 域时的数值精度损失。
QAT 通过在训练损失中包含量化误差来解决这个问题,因此训练一个 INT8-first 模型。
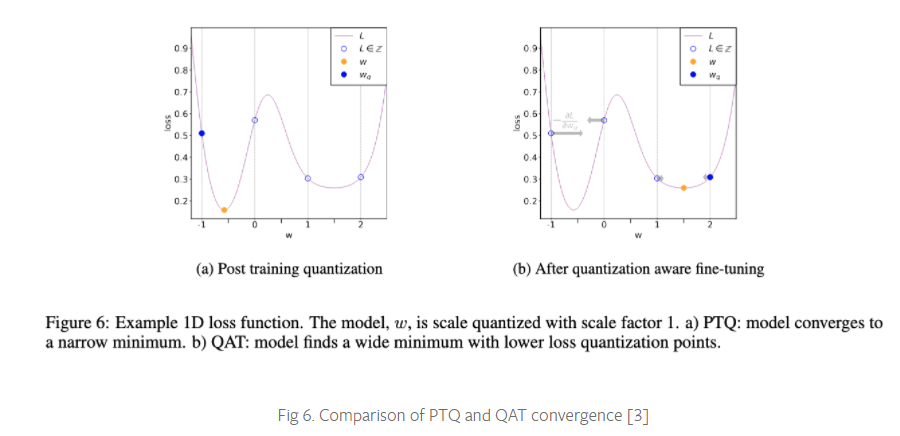
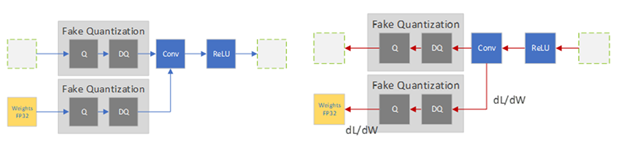
所有的权重和偏置都存储在 FP32 中,反向传播照常发生。然而在正向传递中,量化是通过 FakeQuantize 模块进行内部模拟的。它们之所以被称为假的,是因为它们对数据进行量化和立即反量化,并添加与量化推理过程中可能遇到的类似的量化噪声。因此,最终的损失可以解释任何预期的量化误差。在此基础上进行优化,可以使模型在损失函数中识别出更宽的区域,并识别出 FP32 参数,这样量化到 INT8 不会显著影响精度。
QAT 比 PTQ 具有更高的精度。
Qparams 可以在模型训练期间学习,以获得更细粒度的准确性(参见 LearnableFakeQuantize)。
在 QAT 中,重新训练一个模型的计算成本可以达到几百个 epoch。[Gholami, Kim, Dong, Yao, Mahoney, and Keutzer, 2021]
除了在将模型实际转换为量化版本之前的训练循环之外,QAT 遵循与 PTQ 相同的步骤:
import torch
from torch import nn
# 运行在 x86 CPU 上。如果在 ARM 上运行,使用 "qnnpack"。
backend = "fbgemm"
m = create_model()
融合:
torch.quantization.fuse_modules(m, ['0', '1'], inplace=True) # 融合第一对 Conv-ReLU
torch.quantization.fuse_modules(m, ['2', '3'], inplace=True) # 融合第二对 Conv-ReLU
Sequential(
(0): ConvReLU2d(
(0): Conv2d(2, 64, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU()
)
(1): Identity()
(2): ConvReLU2d(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU()
)
(3): Identity()
)
插入存根(打桩):
m = nn.Sequential(torch.quantization.QuantStub(),
*m,
torch.quantization.DeQuantStub())
准备:
m.train()
m.qconfig = torch.quantization.get_default_qconfig(backend)
torch.quantization.prepare_qat(m, inplace=True)
Sequential(
(0): QuantStub(
(activation_post_process): HistogramObserver()
)
(1): ConvReLU2d(
2, 64, kernel_size=(3, 3), stride=(1, 1)
(weight_fake_quant): PerChannelMinMaxObserver(min_val=tensor([]), max_val=tensor([]))
(activation_post_process): HistogramObserver()
)
(2): Identity()
(3): ConvReLU2d(
64, 128, kernel_size=(3, 3), stride=(1, 1)
(weight_fake_quant): PerChannelMinMaxObserver(min_val=tensor([]), max_val=tensor([]))
(activation_post_process): HistogramObserver()
)
(4): Identity()
(5): DeQuantStub()
)
循环训练:
n_epochs = 10
opt = torch.optim.SGD(m.parameters(), lr=0.1)
def loss_fn(out, tgt): return torch.pow(tgt-out, 2).mean()
for epoch in range(n_epochs):
x = torch.rand(10, 2, 24, 24)
out = m(x)
loss = loss_fn(out, torch.rand_like(out))
opt.zero_grad()
loss.backward()
opt.step()
转换:
m.eval()
torch.quantization.convert(m, inplace=True)
Sequential(
(0): Quantize(scale=tensor([0.0080]), zero_point=tensor([0]), dtype=torch.quint8)
(1): QuantizedConvReLU2d(2, 64, kernel_size=(3, 3), stride=(1, 1), scale=0.0106028001755476, zero_point=0)
(2): Identity()
(3): QuantizedConvReLU2d(64, 128, kernel_size=(3, 3), stride=(1, 1), scale=0.004767395555973053, zero_point=0)
(4): Identity()
(5): DeQuantize()
)
敏感性分析#
并不是所有层对量化的响应都是一样的,有些层对精度下降比其他层更敏感。确定最优的层组合以最小化精度下降是非常耗时的,因此 [Wu, Judd, Zhang, Isaev, and Micikevicius, 2020] 建议进行一次一次的灵敏度分析,以确定哪些层最敏感,并在这些层上保持 FP32 的精度。在他们的实验中,跳过 2 个 conv 层(在 MobileNet v1 的 28 个 conv 层中)使他们接近 FP32 的精度。使用 FX Graph 模式,可以创建自定义 qconfigs 来轻松做到这一点。
# ONE-AT-A-TIME SENSITIVITY ANALYSIS
for quantized_layer, _ in model.named_modules():
print("Only quantizing layer: ", quantized_layer)
# The module_name key allows module-specific qconfigs.
qconfig_dict = {"": None,
"module_name":[(quantized_layer, torch.quantization.get_default_qconfig(backend))]}
model_prepared = quantize_fx.prepare_fx(model, qconfig_dict)
# calibrate
model_quantized = quantize_fx.convert_fx(model_prepared)
# evaluate(model)
另一种方法是比较 FP32 和 INT8 层的统计数据;常用的度量有 SQNR(信号量化噪声比,即 Signal to Quantized Noise Ratio)和均方误差(Mean-Squre-Error)。这种比较分析也有助于指导进一步的优化。
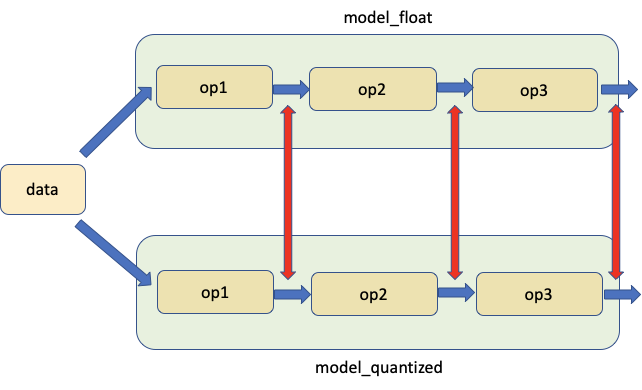
PyTorch 在数值套件下提供了帮助进行此分析的工具。从完整的教程中了解更多关于使用 Numeric Suite 的信息。
# extract from https://pytorch.org/tutorials/prototype/numeric_suite_tutorial.html
import torch.quantization._numeric_suite as ns
def SQNR(x, y):
# Higher is better
Ps = torch.norm(x)
Pn = torch.norm(x-y)
return 20*torch.log10(Ps/Pn)
wt_compare_dict = ns.compare_weights(fp32_model.state_dict(), int8_model.state_dict())
for key in wt_compare_dict:
print(key, compute_error(wt_compare_dict[key]['float'], wt_compare_dict[key]['quantized'].dequantize()))
act_compare_dict = ns.compare_model_outputs(fp32_model, int8_model, input_data)
for key in act_compare_dict:
print(key, compute_error(act_compare_dict[key]['float'][0], act_compare_dict[key]['quantized'][0].dequantize()))
对您工作流程的建议#
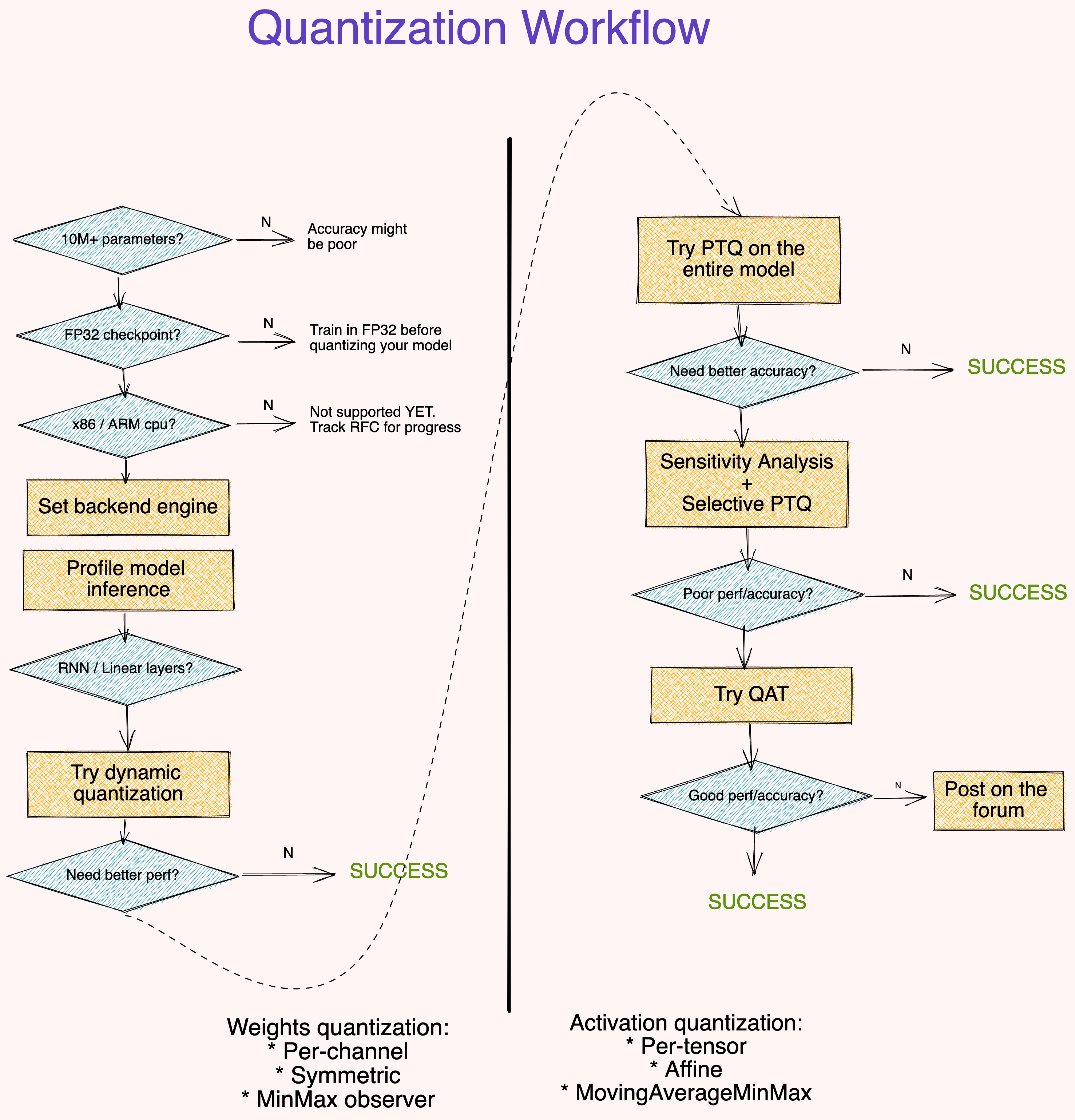
要点:
大(10M+ 参数)模型对量化误差更具鲁棒性。
从 FP32 检查点量化模型比从零开始训练 INT8 模型提供了更好的 accuracy。
分析模型运行时是可选的,但它可以帮助识别阻碍推理的层。
动态量化是一个简单的第一步,特别是当您的模型有许多线性或递归层时。
使用逐通道对称量化借由
MinMax观测者量化权重。使用逐张量仿射量化借由MovingAverageMinMax观测者量化激活。使用诸如 SQNR 之类的度量来确定哪些层最容易受到量化误差的影响。关闭这些层上的量化。
使用 QAT 对原始训练调度的大约 \(10\%\) 进行微调,退火学习率(annealing learning rate)调度从初始训练学习率的 \(1\%\) 开始。
如果上面的工作流程不适合你,我们想知道更多。发布一个包含你的代码细节的帖子(模型架构,准确性指标,尝试过的技术)。请抄送 @suraj.pt。